-
11-27 20:30...这也对机器人本体、感知与控制的精准度、稳定性、容错度提出了极高的要求,这个过程不仅涉及瓶子、杯子、搅拌棒等多种常见物体,机器人还需要以多种动作操作这些物体,包含抓、放、倒这些常规操作和旋转、摇晃等双手协同动作,以及更高难度的抛接、翻转等动态操作和插孔、穿刺、搅拌等精细操作动作。这头人形机器人还在调酒,那头一双灵巧手已经... 0
-
11-27 20:20...他将继续深化对电子皮肤各项性能的研究,拓展其应用,用柔软的材料,做“过硬”的技术。高性能电子皮肤阵列。张郗郡摄电子皮肤:兼具高精度与大量程的柔性传感器“所谓电子皮肤,其实是一类柔性传感器,具有类似人体皮肤一样柔性、轻薄的形态,能够和周围环境进行交互。”郭传飞介绍。走进郭传飞团队位于南方科技大学的实验室,一进门的桌子上就... 0
-
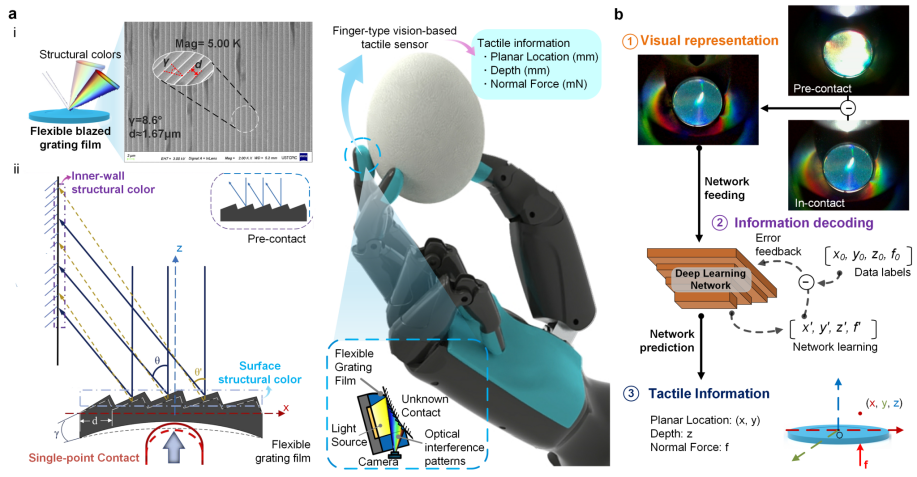
11-27 18:50...基于视觉识别原理的触觉传感器(也被称为视触觉传感器)成为触觉感知领域的重要研究方向。然而,现有的视触觉传感器主要依赖几何光学信息或标记跟踪技术,其触点力位识别感知的分辨率和精度受到了严重制约。针对这一难题,研究团队受仿生结构色现象的启发,创新性地采用柔性光栅薄膜在白光照射下形成的结构色图案作为触觉表征信息,并结合深度学... 2
-
11-25 08:10...说:“通过计算机视觉和物体识别方面的进步,人工智能或多或少获得了视觉。不过,它还没有发展出类似人类的触觉,比如可以分辨毛糙的报纸与光面杂志纸的那种触觉。”这一状况刚刚成为历史。史蒂文斯理工学院量子科学与工程中心的科研人员展示了一种赋予人工智能以触觉的方法。沙永孟以及量子科学与工程中心主任黄宇平(音)、博士生丹尼尔·塔丰... 4
-
11-22 06:00...本轮融资新股东阵容涵盖了上市公司产业背景、国资背景、头部CVC以及知名财务投资机构。戴蒙机器人方面表示,本轮融资将主要用于戴盟机器人视触觉(光学式触觉)传感器、触觉灵巧手以及含触觉的多模态感知操作模型等产品与技术研发工作,加速其在战略场景的落地应用,打造全球领先的精细操作智能体。戴盟机器人创始人兼CEO段江哗表示,公司... 0
-
11-18 20:40...戴盟机器人是全球领先的多模态触觉具身智能研发企业,打造了全球唯一具备自主知识产权和量产能力的“毫米级厚度”视触觉传感器,在保证高分辨率的基础上,突破性地将传感器厚度从厘米级缩小至毫米级,让机器人的指尖能够像人一样精准感知三维力、滑动、纹理和软硬度等多模态触觉信息。此外,戴盟先于行业定义了含触觉多模态感知操作模型,并结合... 1
-

-
11-14 20:50...其不仅为研究人类触觉提供了全新视角,还展示了人类、老鼠和猕猴之间在触觉感受上的相似性和显著差异。传统观点认为,每种特定的感觉,如疼痛、寒冷等都对应着一种特定类型的神经细胞。然而,这项新研究对这一观点提出了挑战,认为人体感觉实际上可能更加复杂。为了更好地理解人类与其他物种之间的异同,团队采用了深度RNA测序技术,对单个神... 0
-
11-13 10:10...并不是故意把站在附近的人弄湿,这背后存在着一个复杂的神经机制。美国哈佛大学医学院的研究人员近日在美国《科学》杂志上发表论文说,他们在小鼠实验中确定了触发小鼠典型性“湿狗抖动”的神经回路,这涉及一类特定的触觉感受器以及连接脊髓和大脑的神经元。“湿狗抖动”这种本能反应是许多哺乳动物共有的,如小鼠、猫、松鼠、狮子、老虎和熊等... 7
-
10-21 17:40...3秒信号延迟导致的摄像头反馈滞后问题。未来,欧洲航天局计划的“月光”项目卫星可以中继传输月球探测车的远程操作信号。布里斯托尔大学的乔·卢卡(JoeLouca)在一份声明中说:“这种模拟系统可以帮助我们从地球上远程操作月球机器人,避免信号延迟的问题。”这套虚拟化模拟系统还整合了“触觉”交互功能。换句话说,这套系统能够给用... 5
-
10-21 09:50...灏存科技、武汉华威科智能技术有限公司(以下简称华威科)等人形机器人相关企业展台成为“热门”体验区,参观者络绎不绝。工作人员在展示电子皮肤压力测试。记者史伟摄“通过肢体动作识别设备上的8个传感器采集数据,结合算法,我们能实时监测佩戴人的活动情况。任何关节活动超过0.001度,都能在3毫秒内接收到。”灏存科技市场运营负责人... 1
-
10-15 22:10...伺服电机主要与精准控制运动、多自由度关节运动、力反馈与安全性、高效能量传输等环节紧密相关。而千觉机器人则专注于研发面向机器人精细操作的多模态触觉感知与智能技术——随着人形机器人产业布局与发展的提速,触觉感知正在成为企业角逐的关键技术。成立于2024年5月,千觉机器人总部位于上海,创始人马道林被业内认为是目前触觉感知领域... 3
-
10-01 19:40...没有任何的提前的建模或者是编程。我们在仿真里面模拟出来了,千奇百怪各种各样的可能复杂的环境和地形,然后让它训练在这样所有的环境里面,都能够很稳定地去行走。在虚拟世界的不断训练为小星提供了丰富的行走经验,但让它在外力面前保持稳定,还需要算法的提升。团队设计了全球首个去噪世界模型。让机器人在仿真训练基础上,可以预测并提取环... 0
-
-
09-17 22:40...世界机器人大会已迈入第十个年头。“业外的人可能会比我们业内站在这个行业里面的人会看得更清楚,哪些场景真正为大众所需要,在商业化上可以很好地落地,并且可能能够走向家用、走向批量的场景,这是我们要关注的第一个点。”马扬表示。作为深耕触觉感知细分赛道的研发者,马扬十分关注机器人的感知融合。“第二点是多模态感知融合,对人来讲有... 1
-
09-11 13:10...没有任何的提前的建模或者是编程。我们在仿真里面模拟出来了,千奇百怪各种各样的可能复杂的环境和地形,然后让它训练在这样所有的环境里面,都能够很稳定地去行走。在虚拟世界的不断训练为小星提供了丰富的行走经验,但让它在外力面前保持稳定,还需要算法的提升。团队设计了全球首个去噪世界模型。让机器人在仿真训练基础上,可以预测并提取环... 5
-
08-31 19:40...这是从0到1的突破。因为在我们之前,在全球市场上没有一款芯片是专门用在触觉传感,尤其是人形机器人的触觉传感的前端,机器人触觉传感的硬件已经成为了限制机器人触觉能力的一个瓶颈。”据马扬介绍,他山科技推出的触觉传感专用芯片,首先解决了机器人对抓取物体材质的识别问题。“原来的机器人手部前面的触觉能力,可能只有简单的一维力,也... 2
-
08-26 18:40...转向为局部协调的迭代。左右手的协同配合,一方面有赖于拥有像人一样自由转动的关节、更多的“自由度”,另一方面还需要多维度的环境感知、更加精密的控制算法。“感知触觉与视触觉相结合的多触觉传感器,配合上持续优化的控制算法,能够处理更广泛的物体交互。比如能实现左手捏住纽扣、右手拿针完成穿针引线这样基于视触觉位姿估计的精细操作。... 1
-
08-26 18:10...人工智能大模型的应用让人形机器人自主决策能力以及上肢的灵活性得到了大幅提升。受访业内人士表示,只有当人形机器人拥有一双灵巧的手,才能更好地适应人类社会现有环境,从而真正走进人们的日常生产和生活。当前,在简单的机械结构基础上,灵巧手集成的前沿技术越来越多、功能越来越完善。人的手拥有触觉感知能力,为了模拟这种能力,帕西尼感... 1
-
08-25 02:20...就有一批企业发力。比如有些企业努力提高手的寿命。目前,仿人机械手产品的寿命通常在6至10万次。而集成了12个触觉传感器模块的FTP系列仿人五指灵巧手,在全球率先实现了商业化量产,寿命提升至100万次以上,抓握能力与人手相当,能够满足日常生活的应用需求。轻点机械手指尖,触感与真人相仿。在一旁的屏幕上,触摸的角度、力度即刻... 0
-
-
08-20 19:20...主要体现在从简单臂到灵巧手的升级,以及运动控制能力的提升等。记者近日在走访中看到,“天工”机器人正在进行日常测试。“我们会在2024WRC上展示‘天工’更多的运动能力。”北京具身智能机器人创新中心人形机器人算法专家张强向央广网记者介绍,从平地行走奔跑到上坡、上楼梯,再到在草、沙、丘、石等复杂路面行走,看似变化不大的场景... 0
-
07-05 18:40...一起打造了这门:《0~2岁亲子律动操》律动操,顾名思义就是跟着音乐节奏,带宝宝做各种规律运动。小宝宝天生就对有节奏的声音更感兴趣,又喜欢和家长亲密接触,这样跟着音乐做游戏的形式,他一定非常喜欢。过程中,宝宝既需要调动身体各部位进行协调运动,还有听觉、视觉、触觉等多感官共同参与,这样一次陪玩,就能让身体和感官同步得到锻炼... 0
-
07-19 12:20...手是人体的第二个大脑!著名教育家蒙台梭利在研究智障儿童的治疗和教育问题后指出,“发展智力需要透过双手来操作”。研究证明大脑神经元的突触多少,跟孩子的智力有一定的关系,而突触链接的数量多半是取决于外界带来的刺激,当宝宝接受了这种刺激,除了通过听觉、视觉、嗅觉之外,最主要的是触觉,细心的家长会发现,孩子会有啃咬物体的习惯,... 3
-
07-01 17:00...腾讯灵巧手TRX-Hand兼具高灵巧和高负载速度的特性,拥有8个可独立控制关节,自重仅1.16千克,最大持续指尖力可达15牛,最大关节速度不低于600度每秒,可轻松应对不同形状尺寸物体的抓取和操作,对高动态的抛接动作也游刃有余。同时,柔性驱动的指尖设计有效提升了手指的抗冲击能力。运动抓取锤击测试(腾讯供图)在感知能力上... 4
-
-





-
本页Url:
-
2024-11-30-23:22 GMT . 添加到桌面浏览更方便.
-

